Change Point Detection with Ruptures
Notes on Time Series Change Point Detection using the Ruptures Package
Using the Ruptures Package for Change Point Detection
Notes on the Ruptures Documentation - code samples and images from the documentation as well
References
!pip install ruptures
import ruptures as rpt
import seaborn as sns
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
Example using Generated Data
An example using Ruptures - adapted from the documentation
In the below diagram, the colors indicate the actual breakpoints and the lines indicate the estimated breakpoints
# generate signal
n_samples, dim, sigma = 1000, 3, 4
n_bkps = 4 # number of breakpoints
signal, bkps = rpt.pw_constant(n_samples, dim, n_bkps, noise_std=sigma)
# detection
model = rpt.Pelt(model="rbf")
model.fit(signal)
result = model.predict(pen=10)
# display
rpt.display(signal, bkps, result)
plt.show()
<Figure size 720x432 with 3 Axes>

Fitting and Predicting
Ruptures models are largely based on the sklearn modelm structure
Making predictions and training can be done using .fit() and .predict() or .fit_predict() which calls both functions and returns the result
Ruptures has a few different algorithms available for detecting change points
All estimtors have the following that can be specified:
modelwhich is the cost function to use (one of:l1,l2,rbf)costwhich is a custom cost function - should be an instance ofBaseCostjumpwhich is used to reduce the possible set of change point indexesmin_sizeis the minimum number of samples between two change points
Models
Dynamic Programming (`Dynp
Finds the minimum of the sum of costs. In order to work the user must specify the number of changes to detect in advance
n, dim = 500, 3
n_bkps, sigma = 3, 5
signal, bkps = rpt.pw_constant(n, dim, n_bkps, noise_std=sigma)
# change point detection
model = "l1" # "l2", "rbf"
algo = rpt.Dynp(model=model, min_size=3, jump=5).fit(signal)
my_bkps = algo.predict(n_bkps=3)
# show results
rpt.show.display(signal, bkps, my_bkps, figsize=(10, 6))
plt.show()
<Figure size 720x432 with 3 Axes>

Linearly penalized segmentation (Pelt)
Relies on a pruning rule in which indexes are discarded. This reduces computational cost but retains the ability to find optimal segmentation
# creation of data
n, dim = 500, 3
n_bkps, sigma = 3, 1
signal, bkps = rpt.pw_constant(n, dim, n_bkps, noise_std=sigma)
# change point detection
model = "l1" # "l2", "rbf"
algo = rpt.Pelt(model=model, min_size=3, jump=5).fit(signal)
my_bkps = algo.predict(pen=3)
# show results
fig, ax_arr = rpt.display(signal, bkps, my_bkps, figsize=(10, 6))
plt.show()
<Figure size 720x432 with 3 Axes>

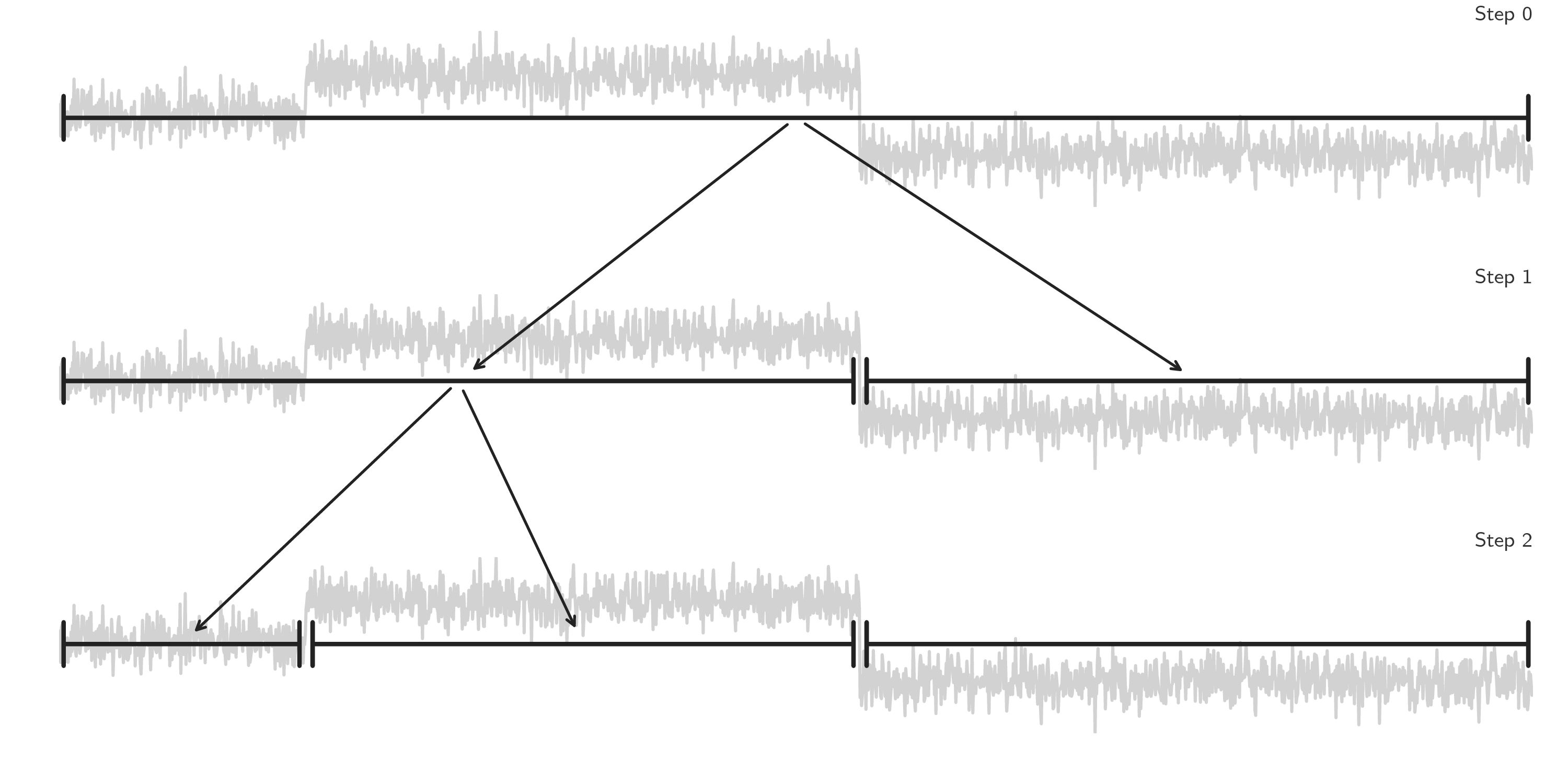
Binary segmentation (Binseg)
Used to perform fast signal segmentation. Works by splitting a signal at a changepoint and then splitting the subsequent signal to find the next nested changepont and so on
# creation of data
n = 500 # number of samples
n_bkps, sigma = 3, 5 # number of change points, noise standard deviation
signal, bkps = rpt.pw_constant(n, dim, n_bkps, noise_std=sigma)
# change point detection
model = "l2" # "l1", "rbf", "linear", "normal", "ar",...
algo = rpt.Binseg(model=model).fit(signal)
my_bkps = algo.predict(n_bkps=3)
# show results
rpt.show.display(signal, bkps, my_bkps, figsize=(10, 6))
plt.show()
<Figure size 720x432 with 3 Axes>

If the number of changepoints is not known it's possible to also speficy a penalty in the form of pen or the residual norm epsilon:
my_bkps = algo.predict(pen=np.log(n) * dim * sigma**2)
# or
my_bkps = algo.predict(epsilon=3 * n * sigma**2)
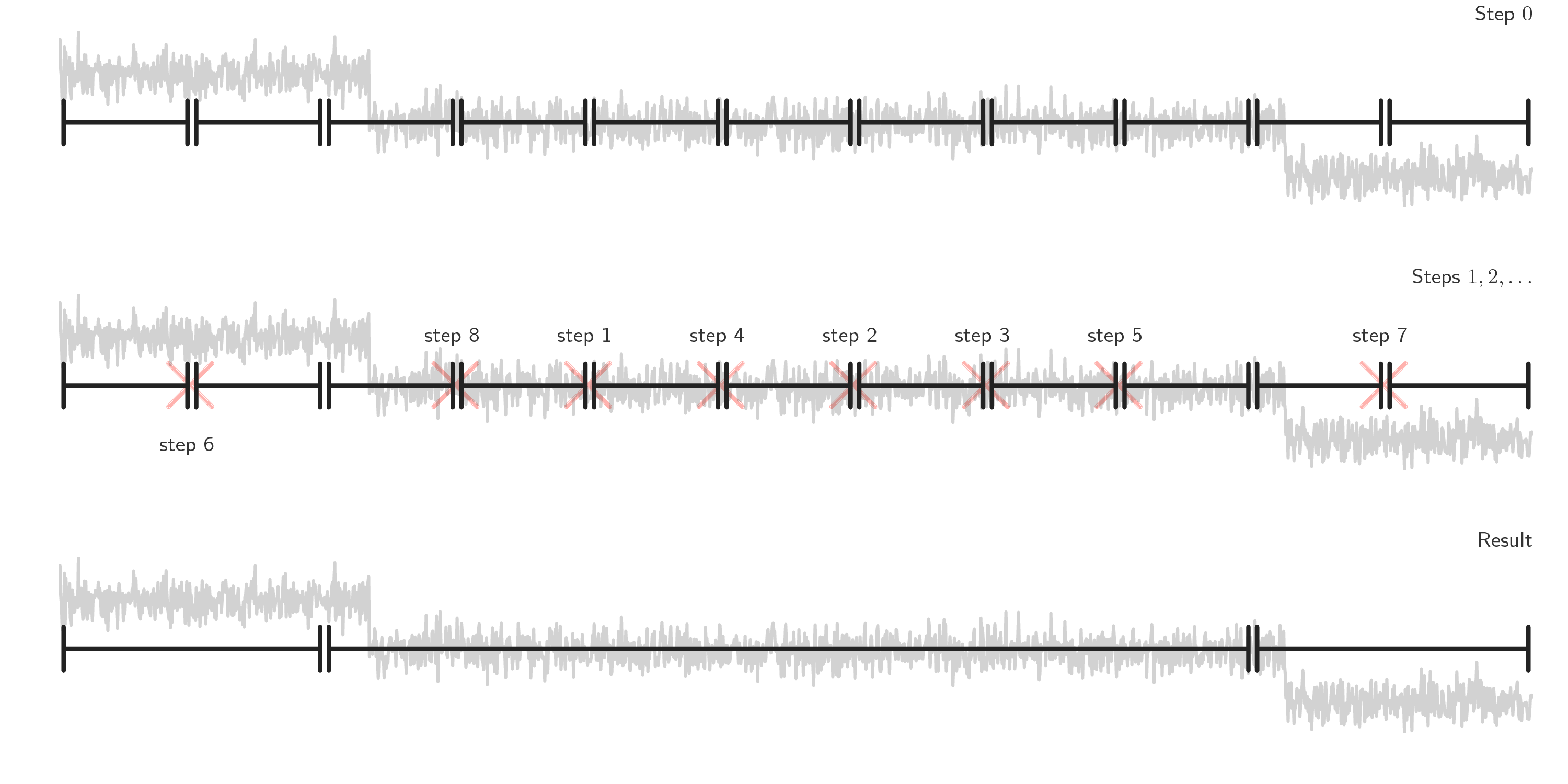
Bottom-up segmentation (BottomUp)
Used for fast change point detection and works by finding many changepoints and then deletes less significant ones
Can be used when the number of changepoints is known, if not it can be given a penalty or residual (same as Binseg)
# creation of data
n, dim = 500, 3 # number of samples, dimension
n_bkps, sigma = 3, 5 # number of change points, noise standart deviation
signal, bkps = rpt.pw_constant(n, dim, n_bkps, noise_std=sigma)
# change point detection
model = "l2" # "l1", "rbf", "linear", "normal", "ar"
algo = rpt.BottomUp(model=model).fit(signal)
my_bkps = algo.predict(n_bkps=3)
# show results
rpt.show.display(signal, bkps, my_bkps, figsize=(10, 6))
plt.show()
<Figure size 720x432 with 3 Axes>

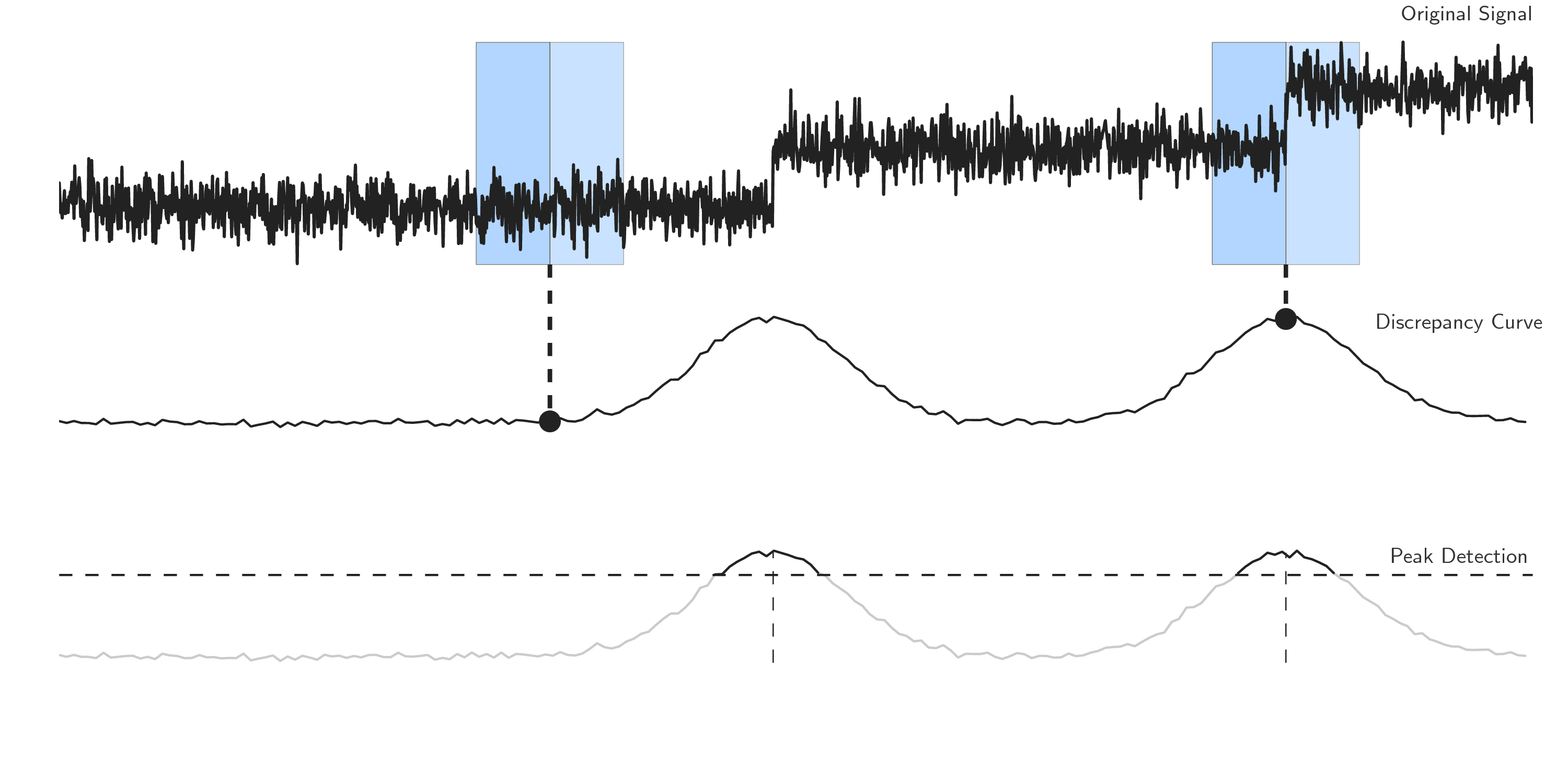
Window-based change point detection (Window)
Uses two windows that slide along the data stream and compares the statistical properties within them to each other using a discrepancy measure which is based on the cost function
Can be used when the number of changepoints is known, if not it can be given a penalty or residual (same as Binseg)
# creation of data
n, dim = 500, 3 # number of samples, dimension
n_bkps, sigma = 3, 5 # number of change points, noise standart deviation
signal, bkps = rpt.pw_constant(n, dim, n_bkps, noise_std=sigma)
# change point detection
model = "l2" # "l1", "rbf", "linear", "normal", "ar"
algo = rpt.Window(width=40, model=model).fit(signal)
my_bkps = algo.predict(n_bkps=3)
# show results
rpt.show.display(signal, bkps, my_bkps, figsize=(10, 6))
plt.show()
<Figure size 720x432 with 3 Axes>
